Utilizo una Nikon d5200 para realizar mis inventos, es mi cámara de batalla con la que realizo las Gigafotografías panorámicas. Esta cámara va equipada con una bateria EN-EL14 que subministra unos 7.4 voltios y un puñadito de miliAmperios suficientes para realizar unas teóricas 600 capturasas, pero todo depende de si utilizamos mucho la pantalla, el estabilizador, el auto-focus, el flash... por lo que esas 600 teóricas tomas son muy relativas.
Yo he logrado realizar algo más de 800 capturas trabajando con enfoque manual , y eliminando por completo todo el tema pre-visualizaciones y evitando al máximo esos consumos citados.
A veces uno sale de casa con las baterías que están en principio a tope pero por lo que sea no lo están, o bién simplemente realizas unas tomas previas, previsualizas , juegas con los menús y luego a fotografiar en serio, resumen que ya no están al 100%.
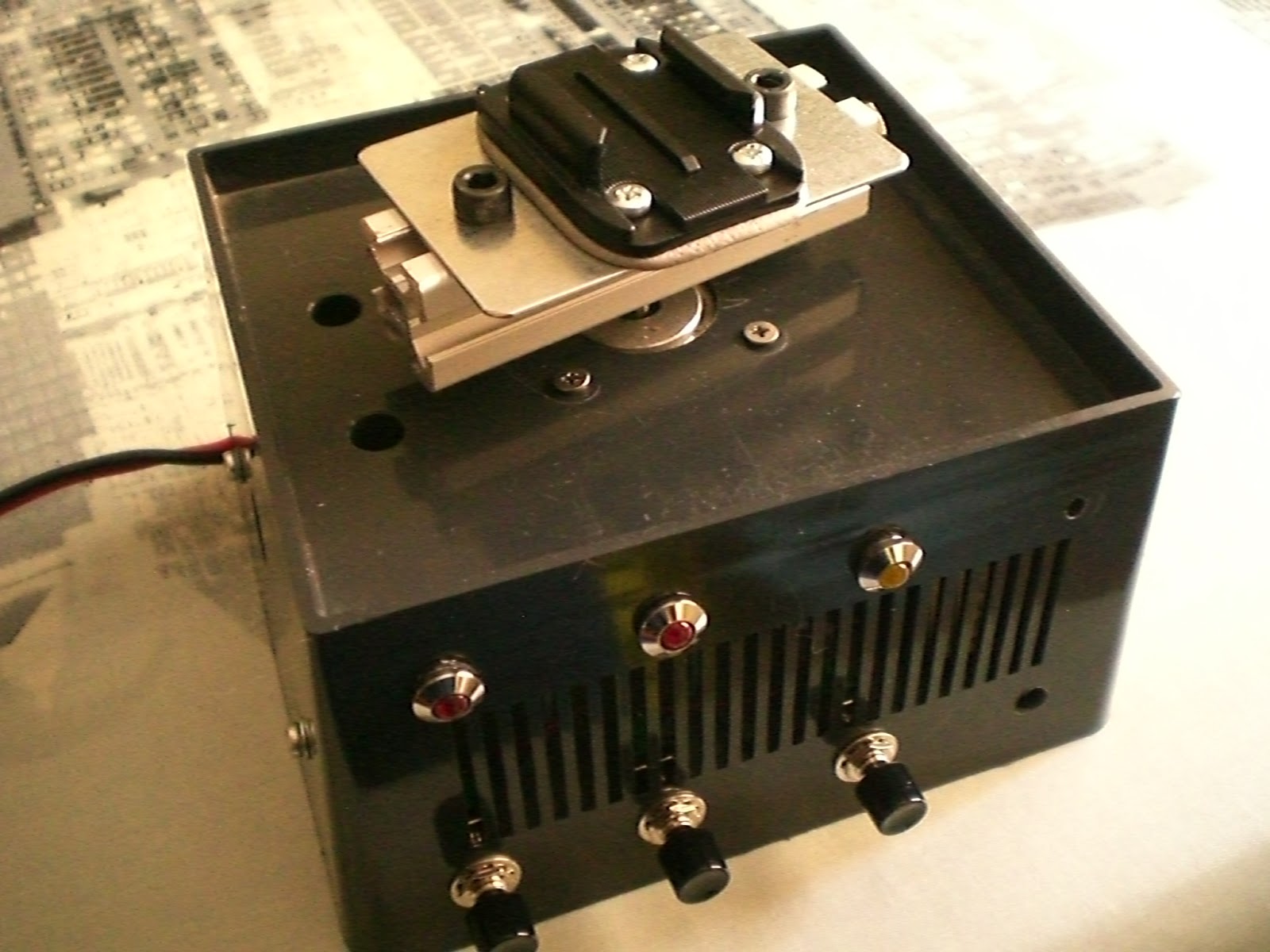
En los dos últimos meses me he encontrado dos veces a 3/4 partes de una Gigapanorámica que me quedo sin batería y en mi último robot para cambiar la misma debo desmontar la cámara. Si debo aflojar el tornillo que fija la cámara hay un riesgo muuuuuy grande de que pierda un poco la posición, lo suficiente para que luego el acoplamiento no sea correcto a la hora de procesarlas. También puede pasar que con esos minutos "perdidos" se muevan las nuves o algun elemento móvil. Tenia la opción de hacer un agujero en la base dónde se aploma la cámara para poder cambiar la batería en cualquier momento, pero ... ¿no será más práctico olvidarse de la batería?
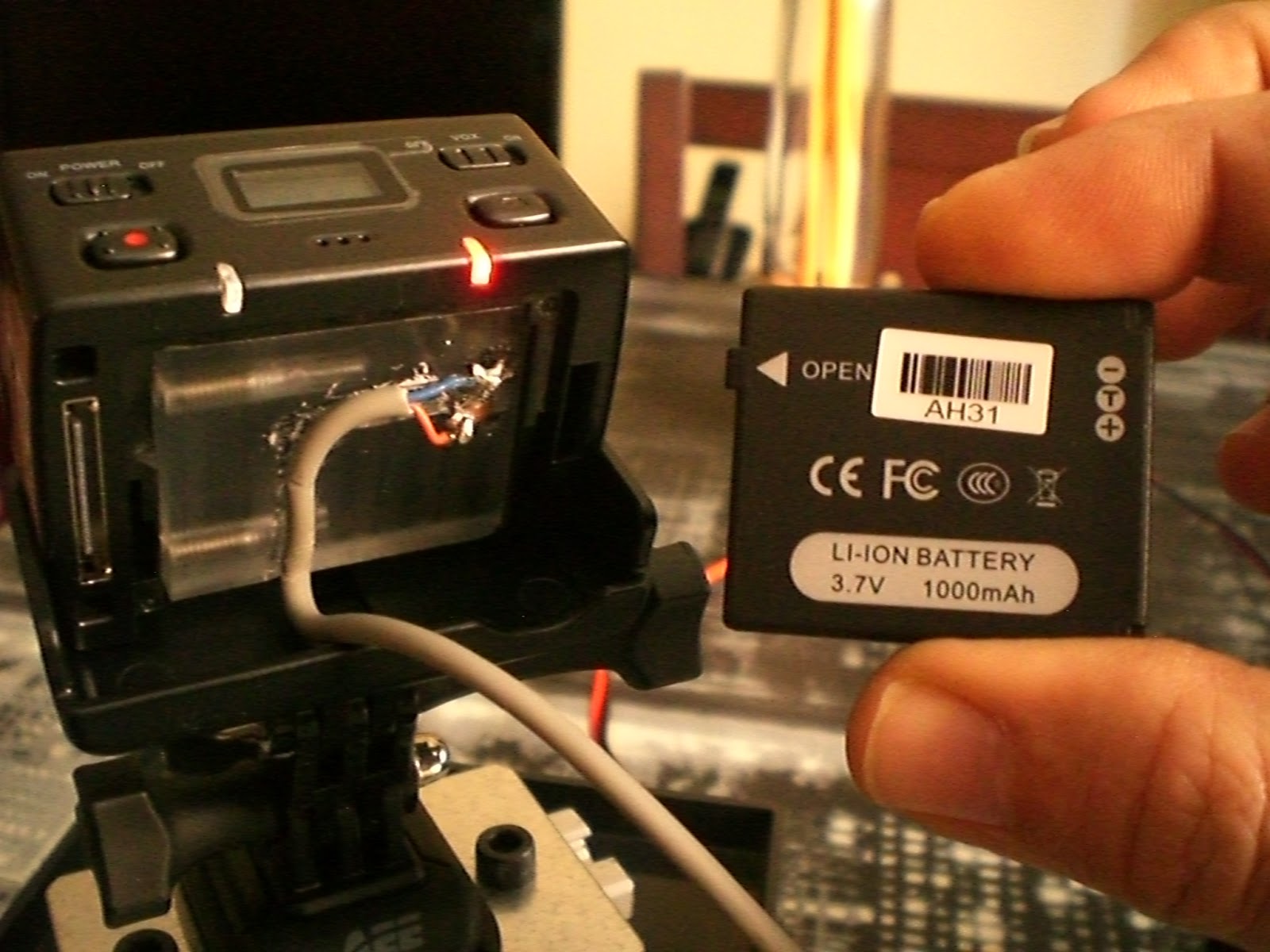
Es por ello que empecé a investigar por el Google ya que sabia que estas cámaras son un poco pejigeras con las baterías y si no le pones una "codificada" se bloquea la cámara.

Nota> Si utilizais un grip para alimentar la cámara mientras una de las dos baterias sean "codificadas" no hay problemas de funcionamiento. El hecho de "codificar" basicamente consiste en la existencia de una pequeña comunicación bateria<=>cámara tal y como explican en el siguiente post de NikonHacker.
Tras ver esta información decidí jugarmela, entendiendo que aparte de la electrónica hay una batería pura y dura y esta es la parte de que yo quería prescindir por lo que cojí una batería clónica (codificada) y haciendo un poco de palanca con un cuchillo de cocina puntiagudo fuí abriendola poco a poco hasta encontrarme con las tripas como se dice bulgarmente.

Tal y como vemos se trata de dos baterias de 3.7V seriadas lo que dan un voltage de 7.4v. Lo curioso es que sale un conductor en el punto de union de ambas por lo que a nuestra placa electrónica también tendrá una señal de 3.7v que deduzco que será usada para hacer trabajar la lógica de la comunicación a 3.3v .

Mediante el uso del voltimetro confirmo los voltajes y polaridad aunque en la propia placa viene marcado como +B y -B . Una vez todo claro y con el uso de unas alicates de corte rompo los tres conductores para liberar la batería de la electrónica.

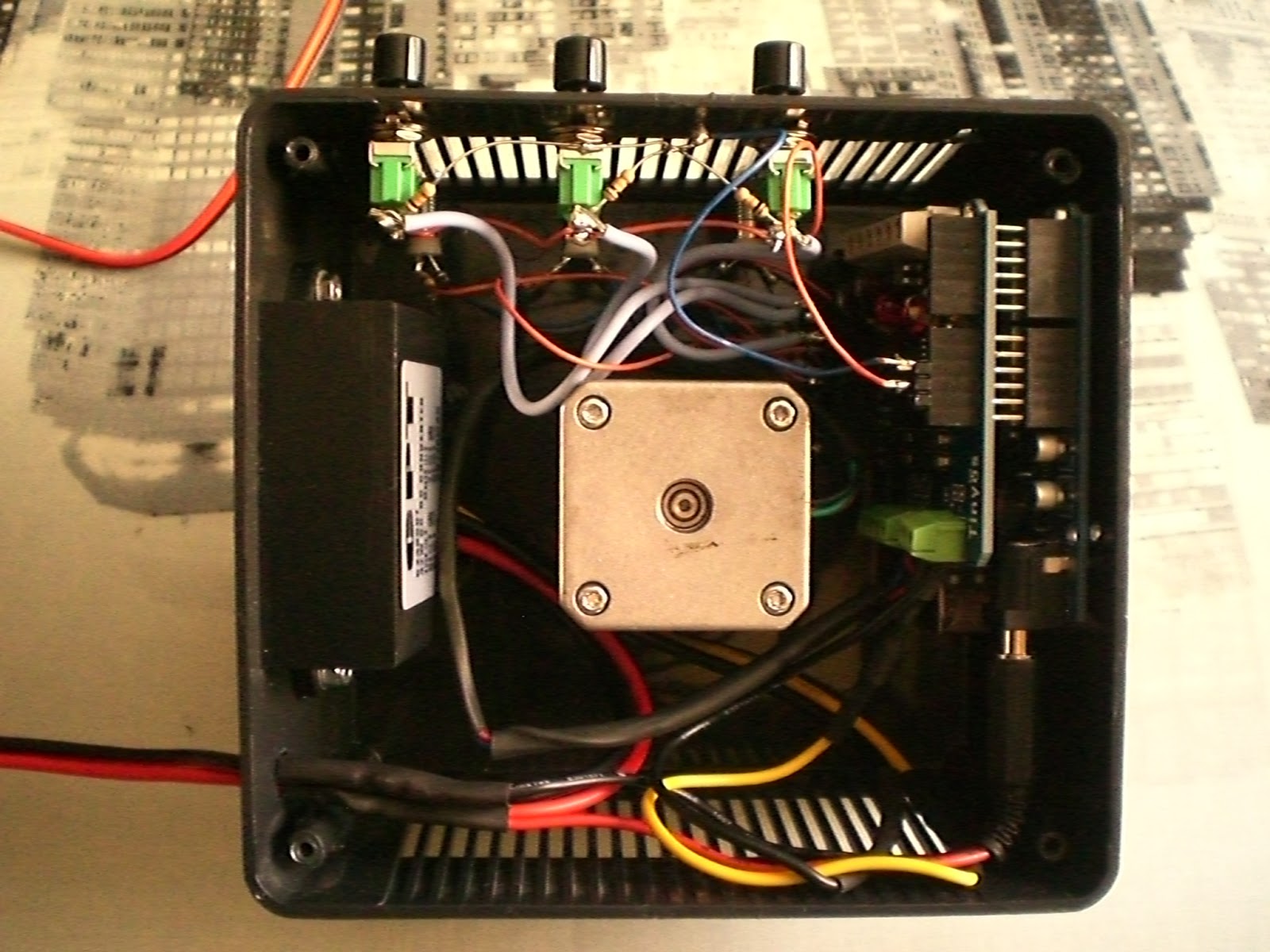
Ahora es cuando cojo un step-down de los que hay que comprar en eBay pues en las tiendas de electrónica de este pais no saben ni lo que es! Se trata de un regulador de voltaje altamente eficiente pues no pierde energía como los 78xx ya que no disipa apenas calor. Lo conecto a una fuente de alimentación externa para regular el voltaje de sálida al mismo valor que me dá cuando conecto el voltímetro a los bornes positivo y negativo de la batería original (en mi caso unos 7.8v marca el display, pero vosotros haced las pruebas correspondientes, yo me la juego con mis equipos, y aquí cada uno que sea consciente de lo que hace).
Como que en el sistema original habia una toma de tensión que tenia la mitad del voltaje, decido aplicar la ley de ohm y hacer un divisor de tensión, para ello usaremos dos resistencias, las dos que encontré primero fueron de 10 k y lo conectaremos tal y como está el siguiente esquema:

Soldamos los cables a la sálida de nuestro step down al igual que las dos resistencias unidas en su extremo entre si. En este punto es dónde obtendremos la mitad del voltaje.

Una vez comprobado que los voltajes sean apropiados sólo queda soldar estos tres cables a la placa electrónica de nuestra batería.

Ahora haremos un pequeño agujero a la carcasa de nuestra antigua batería para poder sacar el cable. Yo he utilizado un cable de portero automático de 3 x 0.5mm

Ya sólo falta ensamblar y probar. Tal y como veis en la siguiente foto aparecen unos terminales en la bateria marcados como T y D que son los encargados de la comunicación.

Finalmente os dejo un pequeño video demostrativo, grabado como he podido pues me faltaban manos jiji! . Yo aun no he tenido la posibilidad de hacer una prueba de campo con centenares de fotografías pero estoy convencido que funcionará.
Como anécdota deciros que a mi me falló la primera vez y no entendía el porqué, lo más preocupante pasaba por pensar si habría frito la cámara pero tras colocar una batería buena observé que funcionaba bién. Luego con paciencia y con la ayuda del téster fuí analizando hasta encontrar que me fallaba la pista del negativo por lo que acabé realizando un puente (cablecito amarillo) casi directo tal y como veréis en la siguiente foto.

Deseo que os guste y os sirva de algo.
Saludos y DIY !