Hace semanas en una sesión de light painting observé a un asistente que tenia conectada su Nikon a un telefono móvil el cual utilizaba como Live View.
Yo como que soy de las cosas a lo grande pensé…¿y en una tablet ?
Me puse a investigar un poco y la cosa es facilísima!
Sólo necesitamos nuestra reflex (Canon , Sony y Nikon funcionan) , un dispositivo android (*) y un cable USB OTG .
El cable adaptador USB OTG (On The Go!) nos permitirá usar nuestro dispositivo android como si se tratara de un disparador remoto con las funcionalidades básicas de nuestra cámara. Obviamente no podremos cambiar el zoom ni enfocar , pero como que en principio usaremos el Live View es posible que lo veamos todo más grande y nos cueste menos enfocar.
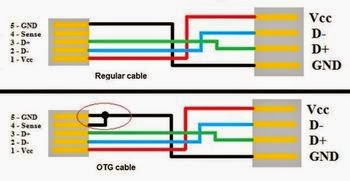
Os dejo un link para que aprendais un poco más de que es un USB OTG. Al fin y al cabo lo único que lo diferencia es un simple puente por lo que externamente no podéis distinguirlos.
Existen tanto para mini como para micro USB.
Si sois manitas y os lo quereis fabricar, es muy simple, con las siguientes imágenes vereis que es un pim pam, pero bueno, en eBay por poco más de un euro podeis tenerlo en casa…
El tutorial , en inglés , y estas imagenes podeis encontrarlas en el siguiente link.
Yo por ejemplo he logrado sin ningún esfuerzo conectar mi Nikon d300s y la d5200 a una tablet china, simplemente he necesitado un simple cable más USB mini a USB.
Obviamente si conectamos nuestra reflex a nuestro dispositivo android mediante el cable USB OTG la cosa no hará nada, necesitamos una aplicación, en mi caso utilizo DslrDashboard, esta aplicación si vais a utilizarla en vuestro Android la podeis descargar gratis desde la Play Store, o bién entrais en su web, desde la cual he observado que también existe esta aplicación para Windows, Linux y Mac OS. En mi caso la descargé para Mac Os y como prueba de ello un pantallazo! Si vais a utilizar un ordenador , tan sólo necesitareis el cable USB típico para enlazar vuestra camara al ordenador.
Lo que si que he podido probar es directamente desde mis dispositivos Android:
Y aquí todo el conjunto:
Aunque no venga al caso, también nos puede servir este cable USB OTG para conectar un pen a nuestro Android para descargar fotos, un teclado, un ratón…
Por cierto, creo recordar que en nuestro dispositivo Android, al igual que en el ordenador se nos genera una carpeta dónde se nos grabaran también las fotos que vamos haciendo. Una de las pegas es la velocidad que será un poco lenta a la hora de previsualizar con cierto retardo, pero si la cosa va de bodegones no hay problema!
Por cierto, si os habéis quedado curioseando sobre que mini tripode utilizo, se trata de un dos en uno: Es un Tripode Silk Mini-Pro al que le he adaptado una rótula Manfrotto 494RC2 con el cual puedo utilizar para realizar fotos desde el nivel del suelo sin tener que utilizar un tripode más grande (obviamente cambia el punto de vista normalmente). Una de las ventajas es que me cabe en la mochila y no me pesa, pero hay que ir con cuidado a la hora de compensar los pesos pues tiene tendencia a caer hacia delante.
Today I want to share how I created a few huge, Gigapixel photos, using a DIYed panoramic head. Actually, it is not a panoramic head because it not only goes right and left, but also up and down.
I’ve been a big fan of panoramic photography and of landscape in general for a long time. But four years ago I was climbing a mountain and the view from the top simply took my breath away. I felt an urgent need to share the image with people don’t climb and therefore will never get access to such views.
Here is the thing though, standard photos do not have enough details. Our eyes have far more resolution that your standard digital camera, so a new project began: I wanted to build the best Gigapan Robot – an automated panoramic head for DSLR.
[editor's note: things get highly nerdy techy from this point on]
I got inspired by some pro grade products, but could not find one that fits my needs: total control and A LOT of weight. The idea is to move a Nikon D90 (about 650 grams) body mounted with a Sigma 150-500mm lens (1.9 Kg) at small increments on two axis overlapping images in both the vertical and horizontal axis.
GIGA-PANORAMIC ROBOT V1.0
Incandescently, just a few days prior to climbing, my friends (Alex & Joan) gave to a quick down about Arduino: it’s a small micro controller with open source software and a lot of expansion options: control motors & sensors and interact with inputs and outputs just like a small PLC.
I’ve had some PLC experience so I was up for the task. only two minor items remained: learn Arduino and build a robot.
My first step was to buy an Arduino UNO and a stepper motor. This stepper motor moves by small increments, around 200 steps for a complete turn. If I can control the movement of the motor , I can control the movement of the camera, now I just needed the write the software.
I took me six months, but I had my robot finished, it was time to test it out.
My first photo - 1098 shots nearing 10 GigaPixels – turned Ok after rendered with AutoPanoGiga.
But while the final results were good photo-wise, I needed to make some improvements to reduce the weight and size of the robot. It was impossible to bring the robot over the mountains. To get it up I would have to split the thing between more than a handful of people, the weight of all parts it’s over 35 kilos.
GIGA-PANORAMIC ROBOT V2.0
Next step was to do some software optimizations, install two wheels and add two aluminum. Now it’s easier to lag around. I still had a big risk of damaging a stepper motor while hiking on rough terrains at the mountains, so this v1.5 was not good enough for me, and I decided to re-design the robot over the next winter.
For the version 2.0 I used a geared stepper motor for the horizontal axis movement, and stronger motor for the others axis.
for control I am still using an Arduino platform, and using switches I can modify the settings of the robot (stuff like zoom, camera type, overlap %, and more).
With this robot I created a 99GPx Gigaphoto of my village, S.ria, a potash village in the center of Catalonia, near Barcelona . It is made out of 4520 single shots. And the magnification is astounding: Nikon d5200 body + Sigma 150-500 @ 500 mm + 1.4x teleconverter.
Both robots are heavy and they both weight about a ton (or at least this is how it feels). Another caveat is the difficulty to move with the needed accessories (battery for the robot, lens, camera, tools, support for the robot), so finally I decide to create a new robot which would be cheaper and lighter.
GIGA-PANORAMIC ROBOT XS
Building on the experience I accumulated building the previous two robots, I tried to optimize all sizes and weights. It was time to design the Panoramic Robot XS !
For this robot I used an aluminium box for install inside the x-axis stepper geared and all electronics parts (Arduino MEGA2560R3, two L298N drivers for the steppers motors, a relay for remote camera shot switch, a step-down voltage converter to reduce the 12v of UPS battery to 5v of the motors NEMA-17, switches, LCD, plugs, etc…)
This is the parts list:
Metal plate (1-1.5 mm): We need a plate approximately 800 x 200 mm.
Metal box . I use an aluminium Hammond 1590FBK
Two NEMA-17 stepper motors . I spend a lot of time to found it! The problem appears of the height of the box. I use a Kysan 1040222 buyed on eBay .
Next , It was time to do a lot of holes in the aluminium box and start assembling
I used a metal plate to support the Y axis, and we fixed the camera using a 1/4-20 bolt. Since this place will only perform with one camera, we wanted to make it fixed on the camera’s Nodal Point. The nodal point would then correspond to the center of both axis. For the horizontal and vertical axis, it was easy, we only needed to calculate the distance from the hole to the center of both axis. The difficult part is finding the d3 value. You can use this guide, or just google for it.
Now, again, it was time for assembling the electronics parts, wiring the steppers motors, the drivers and connecting power supply.
And the last step was uploading the Arduino code. If you are building this and need the code, please contact with me (via the comments or the contact details supplied below).
Using this last robots I create Gigaphotos of about 30 GPx. This is the resolution I get using a Nikon d5200+ Tamron 70-300 @300mm. It takes about 1,000 per panorama. If you thought the camera part was hard, wait till you feed 1,000 photos to your computer ;).
I have another robot optimized for a Sigma 150-500mm lens, more stronger. The electronics and code are the same, I only had to change the mechanics of it to support more weight. With the bigger robot I can create 99 GPx photos composed of over 4500 shots each.
ABOUT THE AUTHOR
Xavier Gonzalo is a climber and a photographer based in Spain. You can see his panoramic work here. You can also read more about his panoramic robots (in Spanish / Gooogle translated) here. Lastly, you can visit Xavier’s youtube channel here.
Este año repetí mis vacaciones en Lurdeia (www.lurdeia.com), una casa de turismo rural cerca de Bermeo (Vizcaya) y decidí pasear el robot para realizar varias fotografias, pero el tiempo meteorologicamente no acompañó y sólo pude realizar una desde esta casa con encanto.
Semanas antes habia cambiado el cuerpo de la camara fotográfica (Nikon d5200) al detectar un problema en el espejo del obturador y tras un par de Gigafotos nefastas por culpa de algun error del mismo cuerpo que provocaba que no realizara las tomas aleatoriamente. Cabe decir que soy consciente de la batalla que le doy a la cámara, ya que en poco más de un año le han caido 30.000 fotos a base de unas cuantas "palizas". Por aquello que más vale malo conocido que bueno por conocer, elejí otra Nikon d5200 para substituirla, y sorpresa : tenia el firmware actualizado a la C1.02 y no me reconoce una de las dos baterías clónicas que dispongo. Intento downgradear a la C1.01 y sigue igual. Busco la versión original C1.00 y no la encuentro por niongún lado, es más empiezo a buscar en foros (del extranjero, off course!) y encuentro que Nikon en la versión 1.01 entre otras cosas ha creado un bug para reconocer baterias clónicas. El miedo viene cuando alimento la cámara directamente desde mi robot y sorpesa : Si funciona!
Si quereis actualizar , es muy fácil hacerlo , pero antes de analizar si realmente os vale la pena o no. Para que os hagais una idea, tengo una Lumix TZ-35 y no la actualizo porque me he documentado y sé que el firmware actual me deja las baterias clónicas inservibles...vosotros mismos!
En fín que me preparo todos los trastos necesarios y realizo una nueva Gigafoto desde Lurdeia, esta vez también uso el Tamron 70-300 ajustados a 300 mm. y como ajustes de camara : modo RAW, iso 2500, f25 y velocidad 1/400. Para determinar estos valores hago el procedimiento habitual: Si utilizo un 300 mm. es equivalente a 450 mm al tener un factor de multiplicación 1.5 en el formato Nikon DX. En principio la velocidad deberia ser superior a 1/450 , pero me la juego y la dejo en 1/400. Ahora toca buscar el compromiso entre apertura del diafragma y sensibilidad. Como que no me gusta trabajar con valores de ISO altos, lo dejo en 2500 y ahora mediante la rueda del selector de diafragmas voy desplazandome a traves de sus valores hasta conseguir un valor de compromiso para que tenga la exposición correcta mirando el exposimetro de la cámara y intentando que la profundidad de campo sea lo máxima possible (diafragma más cerrado posible). El enfoque, otro dilema, hay que buscar otro compromiso siguiendo la regla de los tercios que dice que desde el punto de enfoque queda enfocado 1/3 por delante y 2/3 por detrás, mejor utilizar un software tipo DOF master...
A continuación arranco el robot, selecciono modo Gigapan, camara Nikon DX, 300 mm y un solape del 20% las otras opciones las dejo como por defecto (modo normal y retardo=0.0 segundos). Acto seguido defino mediante el joystick los extremos inicial y final obteniendo 47 columnas por 28 filas, lo que equivale a 1316 capturas abarcando unos 170º horizontales y 60 verticales aproximadamente.
Es hora de empezar el proyecto , y parece que todo va bién, en realidad tengo mis dudas, la gente acaba de desayunar y sé que saldrán personas por la puerta, movimiento de vehiculos... mis prediciones obvias se cumplen, pero en principio no me afectan al area que estoy fotografiando en aquel momento (el verde más próximo, la carretera...). Minutos más tarde de realizar el video , Neus y su marido se sientan en la mesa , mientras que Markus y Elke en un banco, él no aparece porque se ausentó mientras el robot tomaba las capturas del banco.
De momento todo controlado justo hasta el momento en que debo fotografiar las personas por segunda vez (solape entre filas), momento en que aparece Emma y segundos más tarde Tomás y me plantan una sombrilla en la mesa, aqui ya casi tiro la toalla, pauso el robot y dejo que se vuelva todo a la normalidad mientras fuerzo al robot manualmente para repetir las tomas de la última fila, siendo consciente y por experiencia previa que hay muchas posibilidades de fracaso en la composición final. La sombrilla es un elemento muy grande para eliminar con el Photoshop y más cuando está en un primer plano.
Puestos al fracaso, sólo queda proseguir y esperar llegar a casa para ver el resultado.
Una vez terminado el proyecto es hora de desmontar los artilugios y aprovechar para explicar a los curiosos como funciona el robot y enseñarles las tripas (Arduino, 2x L298N, LCD 4x20 , 2xNema-17, etc...)
Ahora vamos a la fase 2: Una vez en casa , convierto los RAW's a JPG (un par de horas haciendolo de modo automatizado), y luego toca arrancar el AutoPano Giga 2.6 en el Mac. En principio parece que pueda "colocar" todas las imagenes en su sitio (vista previa) pero una vez intento editar para recortar me doy cuenta de que no es así: tengo media linea que repetí por culpa de la sombrilla que me hace un efecto Ghost (clonado). Para evitar esto se me ocurren dos opciones: La primera es de recortar la parte inferior de la imagenes que se clonan, en otras palabras toca recortar 47 imagenes a la misma altura, y acto seguido volver a procesar, mientras que la opción 2 es renderizar la imagen y luego cortarla y encajarla mediante Photoshop .
Decido aplicar la opción 1 y obtengo el resultado deseado , ahora en modo edición no veo el clonado de media linea, ejecuto la orden de grabación a formato PSD/PSB y ya sólo toca esperar más de 15 horas que el ordenador tenga terminada esta tarea. Informo que utilizo un iMac core i7 de 8 nucleos, 32 GB de RAM y 2 de video. Si intentais realizar el mismo proyecto con un ordenador con menos prestaciones se os puede quedar en el intento. También es necesario disponer un disco duro grande, pues los archivos temporales pueden ser superiores a 1 TB ! Horas más tarde obtengo el archivo cuyo peso es superior a 250 GB .
Antes de subirlo al servidor de Gigapan suelo abrir el archivo con el Photoshop e intentar eliminar las matriculas de los coches y intentar corregir algun defecto. Es un proceso lento, en este caso para abrir el archivo necesité más de 1.5 horas y para grabar puede llegar a ser el doble. Si utilizais discos duros de estado sólido SSD estos procesos serán mucho más rápidos pero según parece estos no están muy preparados para estos menesteres.
Una vez abierto el archivo resultante , observé muchas lineas de varios pixeles que me recordaban a las interferencias de los televisores. Generé otra imagen con menos resolución y se veia correctamente. Volví a abrir el archivo grande y apareció el mismo problema por lo que decidí volver a generar de nuevo la imagen, y esta vez parece que se procesó/grabó correctamente.
Ahora es hora de subir el archivo resultante , y tras algo más de 40 horas ya está la imagen de 30 GigaPixeles visible para todos . Posiblemente y a dia de hoy la más grande de Vizcaya.


%2B19.16.08.png)















%2B10.06.24.png)
%2B10.07.39.png)











































