Para este año también tengo la previsión de hacer un time-lapse de los largos (4-5 minutos) . Para los que desconocéis de que se trata es de realizar varias tomas fotográficas y luego editarlas en plan video. Si tenemos en cuenta que en el sistema europeo el flujo de imágenes de video es de unas 25 fps (imágenes por segundo) ya podemos empezar a coger la calculadora:
300 segundos (5 minutos) * 25 fps = 7500 fotos...
La técnica basicamente se compone de realizar dichas tomas respetando un intervalo de tiempo. Todo depende del paisaje: si hay nubes en movimiento con unos 30 segundos entre fotos es suficiente por lo que generar un video de 5 segundos nos puede comportar el siguiente tiempo:
25 fps x 30 segundos (intervalo) x 5 segundos (video resultante) = 3750 segundos, un poco más de una hora
Si hacemos lo mismo con 7500 fotos nos daria unos 62,5 horas tomando fotos...
Para realizar dicho video podemos coger nuestra cámara , colocarla en un trípode y si tiene función de intervalómetro ir tomando capturas . En mi caso tengo previsto usar una cámara de deportes de acción AEE modelo SD19 por varias razones:
* pequeña (se esconde en cualquier sitio, ideal para dejarla "perdida" en el monte un dia)
* simple de usar, menus justos, tampoco se trata de realizar fotos de excelente definición.
* no tengo ganas de maltratar a mis reflex's que ya lo hago con las Gigapanes !
Para darle un poco más de vida al video se suelen utilizar slider-dolly (tengo una medio fabricada) y yo quiero innovar usando un robot de rotación de un eje al cual le llamo rotation-lapse.
Este , aun en fase v0.0, basicamente la función que tiene es ir girando la cámara en varias posiciones , así puedo tomar una captura hacia un paisaje, y a continuación girar y fotografiar otro ángulo de vista desde el mismo lugar. Acto seguido espera un tiempo y vuelve a fotografiar de nuevo sobre la captura inicial y así sucesivamente creando dos tomas diferentes aprovechando el tiempo.
Para ello utilizo un motor NEMA-17 (stepper o paso a paso) controlado por Arduino y una shield Ardumoto con un driver L298
Unas imagen general de las tripas:
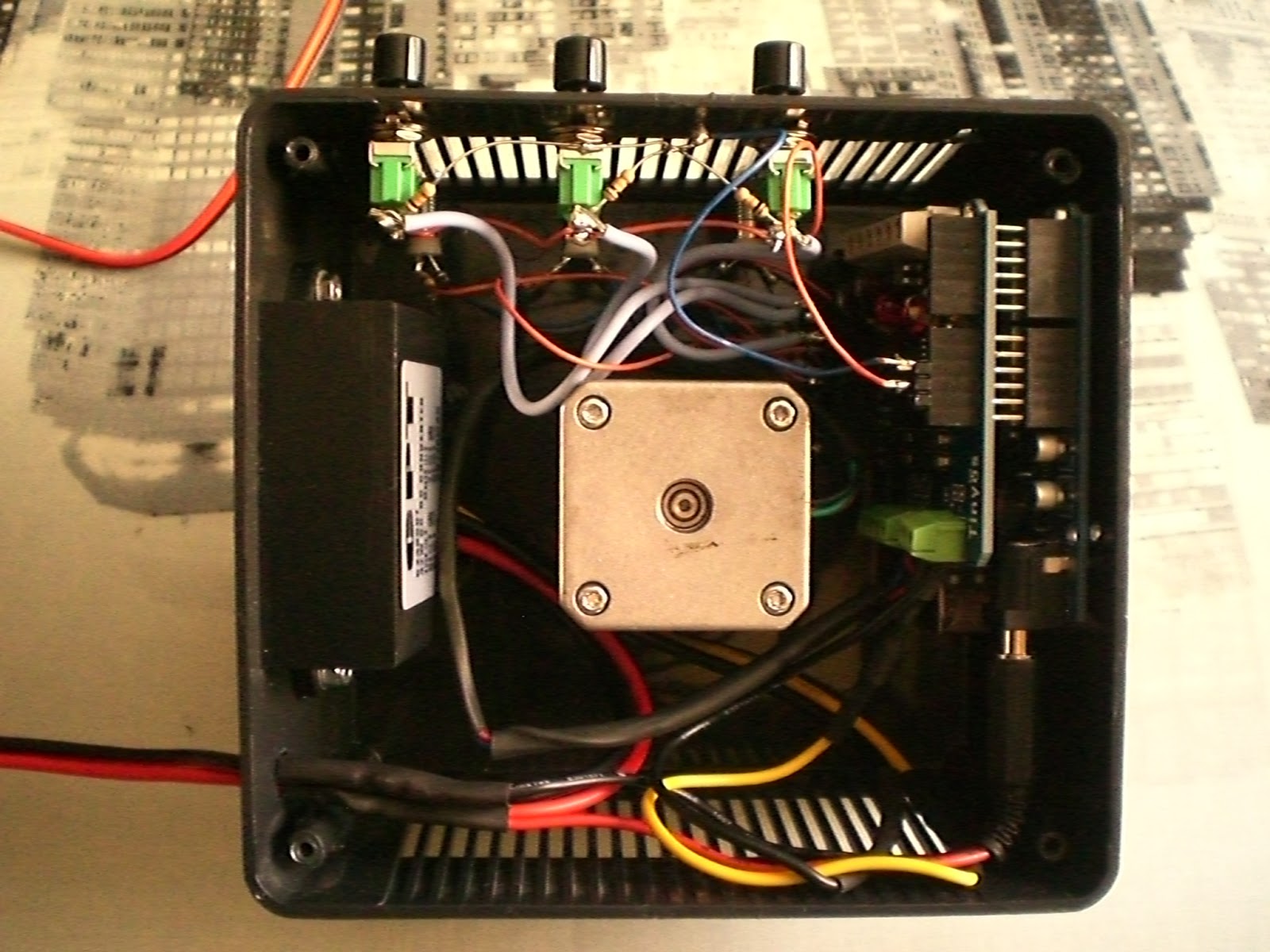
Ahora la parte lógica y de control (Arduino + Shield Ardumoto de Tinyos):

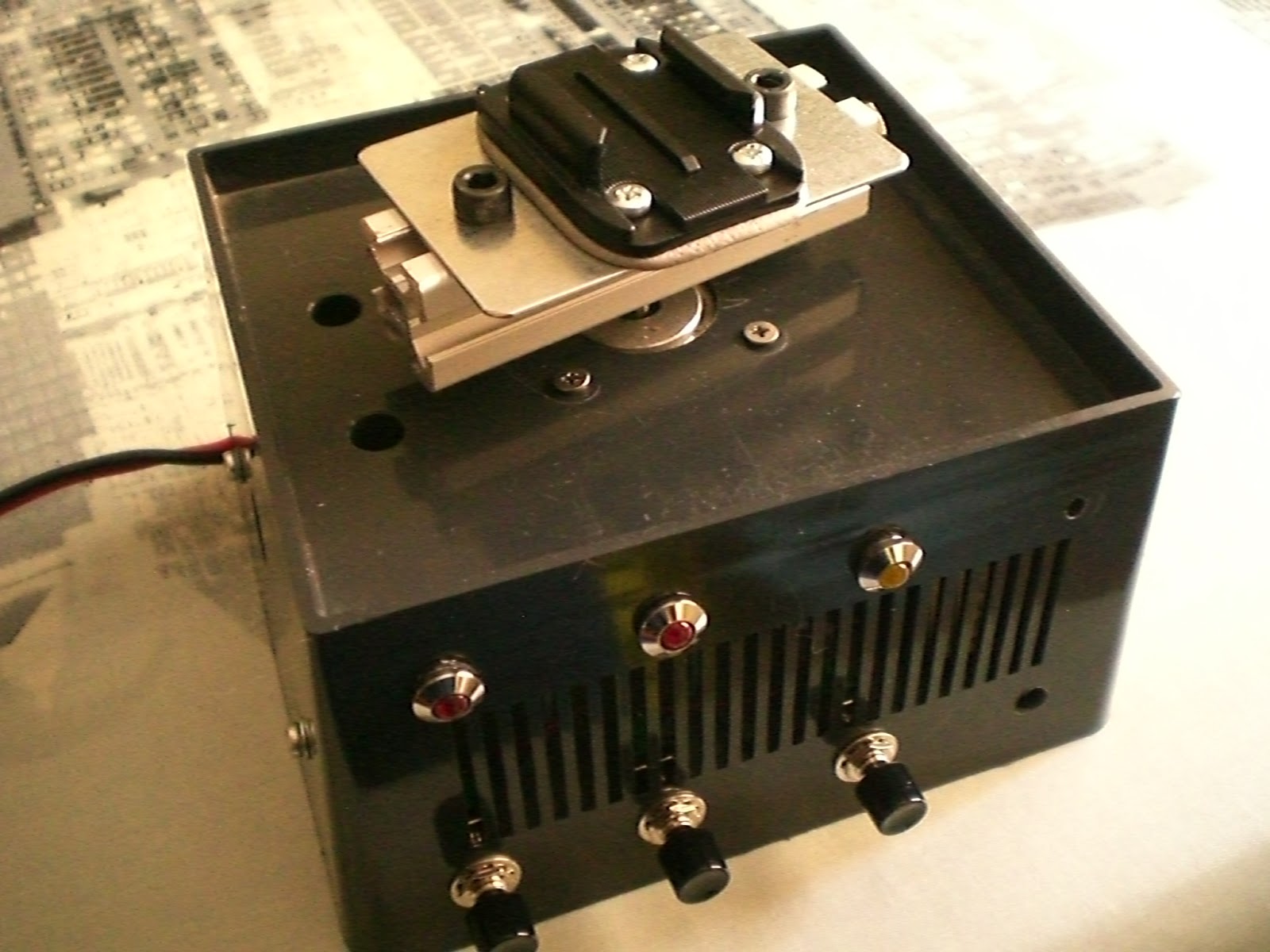
El motor NEMA-17 y el step-down (conversor 12VDC>5VDC):

Y una vision general:
Hasta aquí todo bastante bien... pero como todos sabéis, las cosas siempre fallan por algún lado:
La bateria de la AEE no da para mucho, la última vez menos de 3 horas y claro si quieres realizar tomas durante toda la noche hace falta más batería.
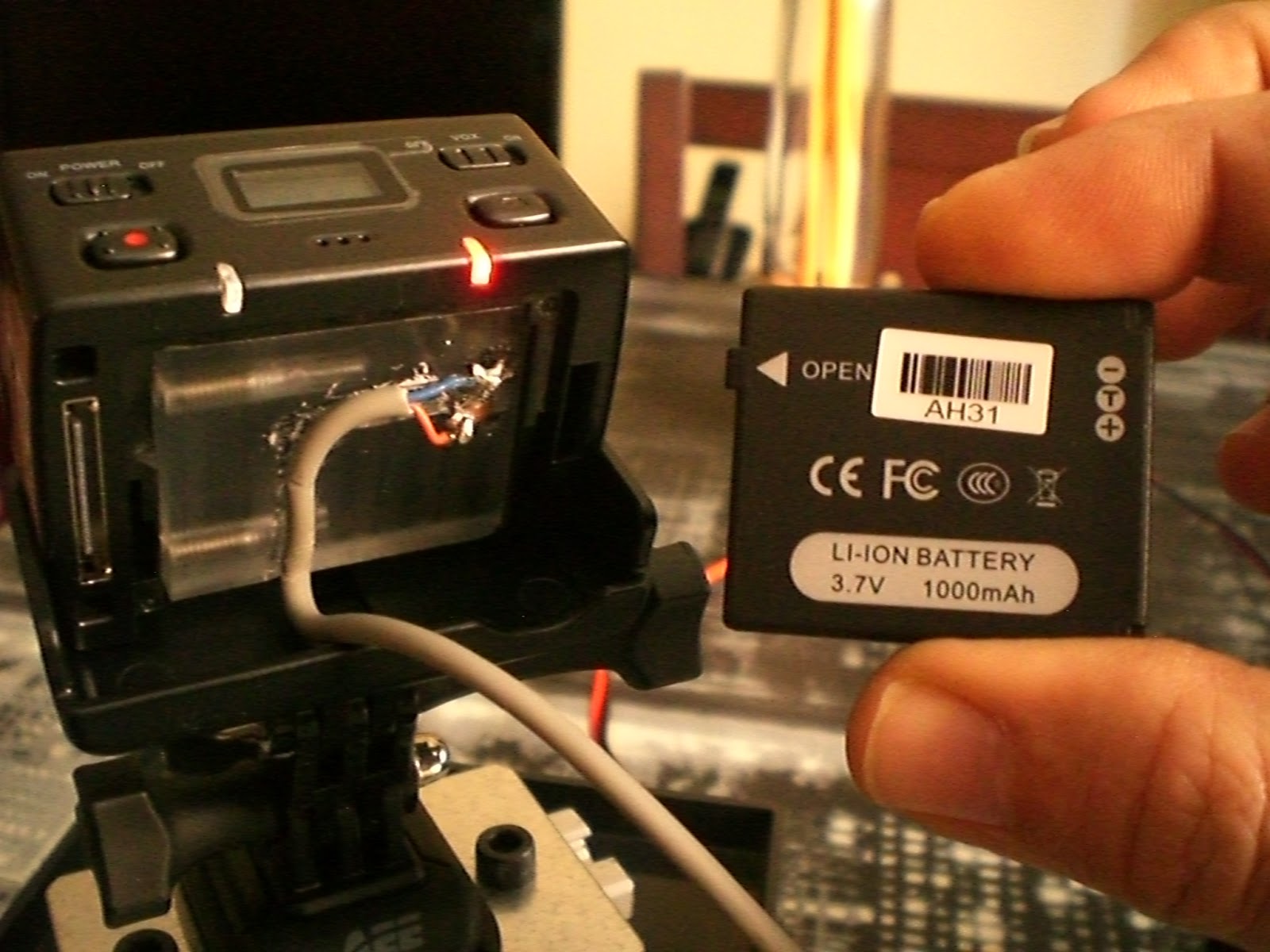
Debido a que dispongo de algunas baterías de 12v y utilizando un step down pensé...¿ porque no me fabrico una batería falsa mediante un metacrilato a la que conecte el step down y que este venga alimentado de una batería de 12 v?
Dicho y hecho!

Encontre un policarbonato de 10 mm, un poco menos del grueso de la bateria original, ahora faltaba dejarlo igual de grande (o un poquito menos) , hacerle dos agujeros de 2.5 mm y colocar unos terminales en la misma posición que las conexiones de la batería original. Soldar cablecillo hacia el step down y jugarsela!
En principio la bateria va a 3.7 v pero a ese voltaje la cámara se reiniciaba sola por la que decidí incrementar el valor hasta los 4 voltios que es dónde se comporta de fábula.

Si quereis ver un video en movimiento del robotillo:
Si quereis ver time-lapses , en youtube hay muchos, pero si se trata de calidad podeis encontrar en la web de Luis Caldevilla
Otra de las posibles aplicaciones del robotillo será que siga la trayectoria (en un sólo eje) de la luna por ejemplo...
Y si todo va bién le incorporaré un LCD vía el puerto I2C para poder realizar menús más descriptivos y poder definir el programa a usar, tiempo entre capturas... todo llegará !




